积木说明
| 积木 | 说明 |
|---|---|
 |
开启或关闭弹窗显示Tello摄像头画面 |
 |
进入或退出起桨模式,起桨模式桨叶慢速转动飞机不起飞,用于给飞机自身降温。静止状态可开启,起飞自动退出起桨。 |
 |
起飞和降落。其中抛飞指将飞机放置在手上,运行这条语句后5秒以内将飞机水平抛出完成起飞。 |
 |
飞机进行各种飞行,各动作需要一定的时间才能执行完成。注意:其中翻滚需要飞机电量充足,否则不执行。 |
 |
设定飞机飞行速度。 |
 |
以设置速度(cm/s)飞往坐标(x,y,z)。x、y、z 不能同时在 -20 ~ 20 之间。 |
 |
以设置速度( cm/s )飞弧线,经过(x1,y1,z1到(x2,y2,z2)如果弧线半径不在 0.5-10 米范围内,则返回相应提醒。x、y、z 不能同时在 -20 ~ 20 之间。 |
 |
紧急停机:停止电机转动。 停止运动并悬停:停止当前动作,桨叶继续转动并悬停。 |
 |
通过Tello实时返回的状态码返回当前飞机各种状态,勾选可以在舞台上显示具体数据。 |
 |
开启挑战卡,如果不开启则挑战卡相关指令无法使用。 |
 |
以设置速度(m/s)飞往设置 id 的挑战卡坐标系的(x,y,z)坐标点。x、y、z 不能同时在 -20 ~ 20 之间 。m1~m8: 对应挑战卡上的挑战卡 ID m-1: Tello 内部算法最快识别到的挑战卡 m-2: 距离 Tello 最近的挑战卡 |
 |
以设置速度( cm/s )飞弧线,经过设置 mid 的挑战卡坐标系中的(x1,y1,z1)点到(x2,y2,z2)点如果弧线半径不在 0.5-10 米范围内,则返回相应提醒。x、y、z 不能同时在 -20 ~ 20 之间 |
 |
Tello 飞往 mid1 坐标系的(x,y,z)点后悬停,识别 mid2 的挑战卡,并在 mid2 坐标系下 (0,0,z) 的位置并旋转向到设置的 yaw 值,( z>0 ) |
 |
开启通过Tello实时返回的状态码返回当前飞机各种状态,勾选可以在舞台上显示具体数据。打开挑战卡探测之后才有数据。 |
 |
返回上一条Tello返回的数据 |
 |
使用主动查询的方式查询飞机信息 |
 |
将飞机切换到STA模式,连入一个wifi热点,多用于组队模式控制。注意热点和密码只能是英文字母和数字。RMTT需要拨动开关到STA模式才会生效 |
 |
修改飞机自身发出的热点账号密码。若设置错误,可在开机状态长按飞机开机键恢复默认设置。 |
 |
查询RMTT扩展模块的状态 |
 |
点亮RMTT扩展模块顶部 led 为指定颜色 |
 |
顶部 led 按照呼吸最大亮度 r、g、b 和呼吸频率 t显示呼吸效果。从最暗变化到最亮再到最暗为一次呼吸。 |
 |
顶部 led 以颜色 1(r1,g1,b1)和颜色 2(r2,g2,b2)按照闪烁频率 t 交替闪烁 |
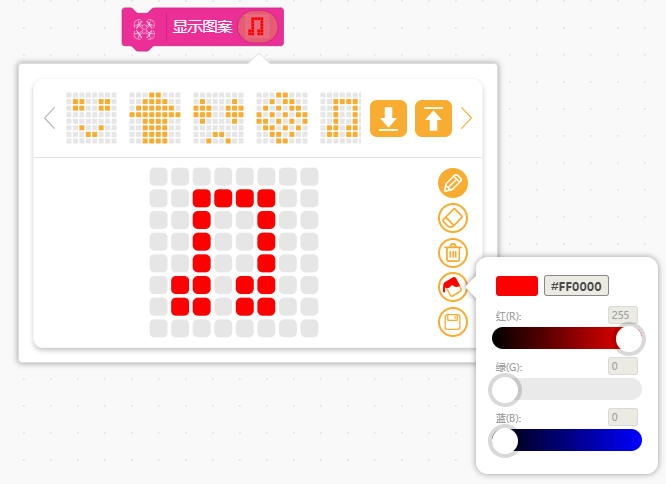 |
点亮点阵屏为自定义图案,注意颜色只有红蓝紫三色。 |
 |
点阵屏显示图案滚动效果 |
 |
点阵屏显示单字符或滚动显示字符串 |
 |
设定屏幕开机时显示的图案。 |
 |
设定整个屏幕显示的亮度 |
 |
读取扩展模块上的TOF测距传感器的值。 |
 |
DIY命令,可以实现与上传模式RMTT主控或手机APP之间交互 |