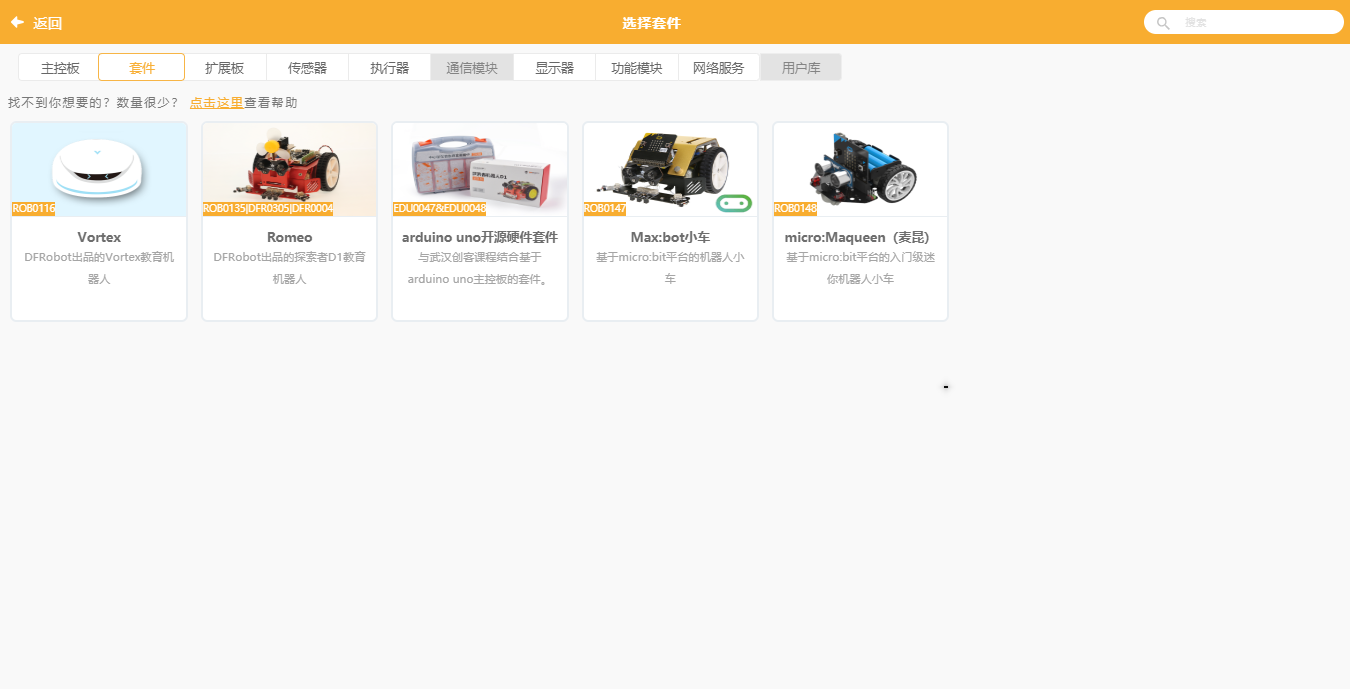
套件界面
麦昆

积木说明
| 积木 | 说明 |
|---|---|
 |
当A按钮被按下 |
 |
当接口P0被接通 |
 |
当徽标朝上 |
 |
显示图案或内置图案 |
 |
显示文字 |
 |
停止滚动动画 |
 |
点亮坐标 |
 |
设置亮度值 |
 |
点阵屏启动 |
 |
熄灭所有点阵 |
 |
接口P0后台播放声音 |
 |
接口P0后台播放声音直到结束 |
 |
接口P0播放音符 |
 |
将声音速度增加20 |
 |
将声音速度设置为120 |
 |
停止后台播放 |
 |
声音速度 |
 |
按钮A是否被按下 |
 |
接口P0是否被接通 |
 |
当前姿态 |
 |
读取环境光强度 |
 |
读取指南针朝向 |
 |
读取温度值 |
 |
读取加速度的值 |
 |
读取磁力计的值 |
 |
读取数字引脚 |
 |
读取模拟引脚 |
 |
设置数字引脚P0输出低电平 |
 |
设置模拟引脚P0输出123 |
 |
设置无线频道7 |
 |
打开无线通信 |
 |
通过无线发送 |
 |
当接收到无线数据 |
 |
串口打印 |
 |
串口是否有数据 |
 |
读取串口数据 |
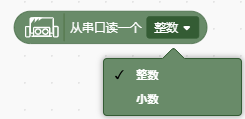 |
从串口读一个整数 |
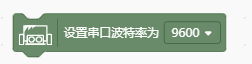 |
设置串口波特率 |
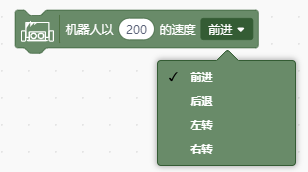 |
机器人以200的速度前进 |
 |
设置电机左侧以200的速度正转 |
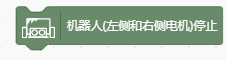 |
机器人左侧和右侧电机停止 |
 |
舵机S1角度90 |
 |
读取超声波距离 |
 |
打开左侧Led灯 |
 |
读取左侧P13巡线传感器 |
 |
当接收到红外消息 |
 |
灯亮度 |
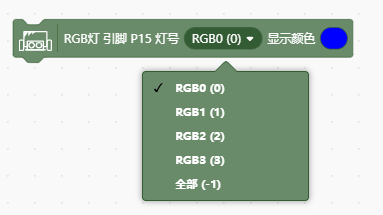 |
RGB引脚P15灯号显示颜色 |
 |
RGB引脚P15循环移动0单位 |
 |
RGB引脚P15设置亮度 |
 |
RGB引脚P15全部熄灭 |
 |
系统运行时间 |